Rapport du 11 janvier 2016
Introduction:
Ce lundi 11/01, nous avons essayé avec Antoine de faire suivre une ligne noire à notre robot.
Étapes:
Pour commencer, nous avons fait des tests pour que lorsque le robot capte la couleur rouge avec son capteur, Il s'arrête. Après plusieurs essais sur le logiciel: "Légo Mindstorm", nous avons réussi à faire s’arrêter le robot quand il capte la lumière rouge.
Par la suite, nous avons fait d'autres tests pour que le robot suive la ligne noire. Au début, nous arrivions à faire suivre la ligne noire droite mais il ne tournait pas. Après plusieurs essais, et surtout l'aide du professeur, nous avons réussi à faire suivre la ligne au robot et à le faire tourner.
Conclusion;
Nous avons réussi l'objectif qui était de faire suivre la ligne noire au robot avec le logiciel: "Légo Mindstorm". Bonne journée!
Ce lundi 11/01, nous avons essayé avec Antoine de faire suivre une ligne noire à notre robot.
Étapes:
Pour commencer, nous avons fait des tests pour que lorsque le robot capte la couleur rouge avec son capteur, Il s'arrête. Après plusieurs essais sur le logiciel: "Légo Mindstorm", nous avons réussi à faire s’arrêter le robot quand il capte la lumière rouge.
Par la suite, nous avons fait d'autres tests pour que le robot suive la ligne noire. Au début, nous arrivions à faire suivre la ligne noire droite mais il ne tournait pas. Après plusieurs essais, et surtout l'aide du professeur, nous avons réussi à faire suivre la ligne au robot et à le faire tourner.
Conclusion;
Nous avons réussi l'objectif qui était de faire suivre la ligne noire au robot avec le logiciel: "Légo Mindstorm". Bonne journée!
En ce vendredi 05/02...
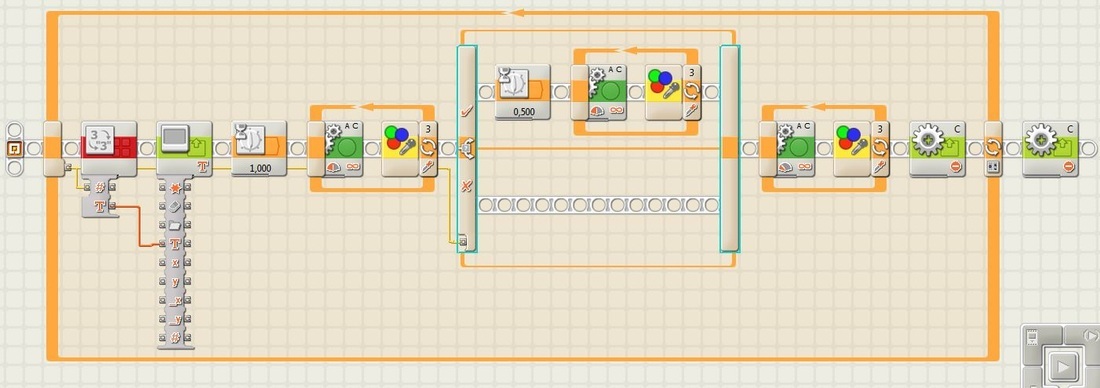
nous avons continué le projet sur les lignes noires. J'ai d'abord commencé par faire 2 boucles avec une qui avance jusqu'à la ligne noir et qui recule jusqu'à la feuille rouge. J'ai remarqué qu'on pouvait copier la boucle et la coller après pour faire de plus en plus d'aller retour ( Mais ce n'était pas le but du programme). Il m'était demandé d'utiliser des boucles des variables et des conditions afin de rendre le programme plus polyvalent.

Ensuite, nous avons réfléchi avec Mme Piron et nous avons eu l'idée de faire une boucle avec une condition et un compteur de ligne noire. Le compteur s'affiche sur le robot et compte le nombre de lignes noires parcourues. La boucle avec condition étant: si le robot est déjà revenu à la zone rouge (Donc si le compteur=1) il fait une ligne noire supplémentaire. Le résultat a fonctionné.
Nous pouvons ajouté une condition dans la condition à chaque fois pour faire avancer de plus en plus loin le robot!
Nous pouvons ajouté une condition dans la condition à chaque fois pour faire avancer de plus en plus loin le robot!